Engineering Student Q&A: Robotics Project


We spoke with Cameron Bauman, a third-year student in Engineering Systems & Computing, along with friends Chase Keeler, also a third-year Engineering Systems & Computing student, and Matthew Salazar, a third-year Computer Engineering student, about a summer project the three of them worked on. Cameron shared how they aimed to apply the knowledge gained from their second-year courses to design and build a remote-controlled quadruped robot. After lots of hard work and troubleshooting, they’ve successfully brought their vision to life with exciting real-world applications!
1. Tell us about the project you worked on this summer.
Earlier this year, two other Engineering students (Matthew Salazar, Chase Keeler) and I began researching quadruped robots and how to recreate one on a smaller scale with real-world applications. We started planning the project in advance so we could get started right at the beginning of summer. Over the past 4 months, we designed, prototyped, and built a remote-controlled quadruped robot with various functions and video livestreaming, inspired by Boston Dynamics' "SPOT" robot.
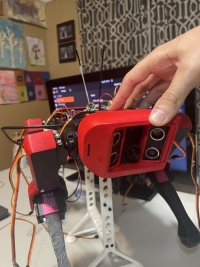
The robot has over 40 3D-printed parts, 12 high-torque servos, a Raspberry Pi 4B, a USB camera, an LCD screen, and other electronics. We modified open-source CAD designs in SolidWorks to fit custom servos and electronics, as well as reinforcing critical joints. Once we had an assembly of the robot, we imported it into an open-source robotics visualization software called RVIZ running on ROS2 Humble (A robotics development platform based on Linux). Once we had the entire robot walking forwards and backwards in the visualizer, we began assembling all the parts we printed. We translated our code from the simulation to the physical legs itself and eventually the entire robotic dog.
This project is a user-controlled platform with dynamic motion from a PS4 controller using pre-programmed gaits. It features a POV camera with livestreaming, an LCD screen for system indicators like battery life, and ultrasonic sensors for obstacle avoidance. Similar to Boston Dynamics ‘Spot,’ this project dives into the realm of human safety, aiding with routine operations. Remote robot applications with autonomous features and FPV live-streaming have been deployed more frequently in real world applications, and it was our goal to attempt to recreate this. This kind of robotic platform could be used for security, search and rescue, mapping dangerous environments, and determining workplace site health with the correct sensors integrated.

2. What are you hoping to accomplish?
Overall, we wanted to hone the additional skills we gained throughout second year and try to scale up the level of technicality from the project we previously made last summer. We developed our project through the engineering and design process with emphasis on materials and cost tracking. We wanted to create a project with more real-world use cases through a combination of hands-on problem solving and theory.
3. How did your studies and previous courses tie into the project?
Relevant coursework included Electric Circuits (ENGG 2450), Kinematics & Dynamics (ENGG 2340), Engineering Design (ENGG 2100). With our design involving multiple high torque servo motors, power consumption was of great concern. Following fundamental principles of circuit design allowed us to determine a suitable battery for our robotic friend, Clifford. Additionally, inverse-kinematics calculations and dynamic analysis was necessary to calculate the walking motions for the dog. General principles of the design process were outlined using procedures learned during our engineering design class.
4. What’s next for the project?
While we successfully achieved a functional walking gait, lateral movement, live camera streaming, and battery monitoring, there is still more that we would like to add and improve. Our next step would be to implement a gyroscope to allow for automatic adjusting depending on the slope of the surface the dog is on. Auto-balancing would allow for use on all terrains and surfaces. Along with this, we would further like to improve the functionality of the walking gait, and hopefully teach Clifford some new tricks along the way too. Currently, we have autonomous detection of objects using ultrasonic sensors. A next step regarding the autonomous detection would be to implement lidar detection to map out an area and store that data and possibly use that to learn specified routes.
5. Why did you take on something like this for the summer?
We were determined to test the knowledge and skills that we developed over the past 2 years with a new technical project that would require even more independent research and real-world applications. One goal we wanted to achieve was to create a reliable variable voltage power module that could act as an effective platform for future robotic projects. This acted as a baseline for the rest of the project. Knowing we had a solid mechanical and electrical foundation ensured us we had enough structural integrity and power for all of the servos, and peripheral devices during testing. We wanted to show other students and aspiring engineers that with enough research, perseverance, and creative problem solving, they can create anything they put their mind to.
6. Did you have faculty support or advising?
During this summer was our first co-op term. This opened the door for additional advising from more experienced engineers, providing advice such as additional troubleshooting steps and clarification on certain components that were new to us. Other than this, we troubleshooted all issues with our previous knowledge and new research over the summer. Online support forums for robotics and electronics were also very useful throughout the project.
7. Do you have advice for students who might be looking to use their classroom skills on a practical project?
Plan. Plan. Plan. Determine where your skillset is and how much time you are willing to dedicate to completing a project. Although this project felt far-fetched, our drive to learn allowed us to stay on track with deadlines designed by us. Even if the project is not perfect, you learned so much because of the process. Using project management skills from classes like engineering design allowed for the entire project planning sequence to go smoothly in all aspects of the design process.